Portfolio
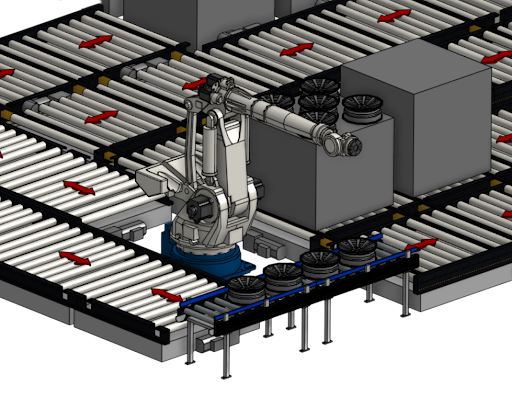
I am a trilingual student at Olin College of Engineering studying mechanical engineering and specializing in mechatronics and robotics. My background spans scaling startup hardware as a founding engineer at YC-backed AutoPallet Robotics and implementing factory automation at Kia. I co-authored a filed utility patent for agricultural drone swarms and led elite robotics teams to world championships.