Team 1391 - The Metal Moose • Team Captain, Lead Builder & Robot Operator • 2022-2024
About Team 1391 - The Metal Moose
As Team Captain, Lead Builder, and Robot Operator for FRC Team 1391 (The Metal Moose), I led our team
through three successful competition seasons, developing innovative robots that competed at the highest
levels including World Championships. My journey with FIRST Robotics has been defined by iterative
design, technical excellence, and leadership growth—from learning the fundamentals in 2022 to leading
comprehensive robot development and achieving top 3% global rankings by 2024.
In the 2024 FIRST Robotics Competition season (CRESCENDO), I served as Team Captain, Lead Builder,
and Robot Operator for Team 1391. Our team designed and built a highly competitive robot capable of
efficiently acquiring and scoring game pieces with remarkable consistency. The robot featured a
cutting-edge four-bar intake mechanism of my design that incorporated advanced sensor systems and
automated controls. Under my leadership, we achieved multiple awards including Engineering
Excellence and competed at the World Championship, ranking in the top 3% globally.
Leadership & Responsibilities
Team Captain: Managed overall robot design and build process, coordinated
between sub-teams, led daily build meetings and progress reviews
Lead Builder: Developed advanced four-bar intake mechanism with sensor-based
detection and automated controls
Robot Operator: Operated robot during competitions, achieving consistent high
performance
Documentation Lead: Created detailed engineering notebook covering entire
development process, establishing new standards for technical documentation
Mentorship: Trained and mentored new team members in CAD, machining, and design
processes
Key Mechanical Systems
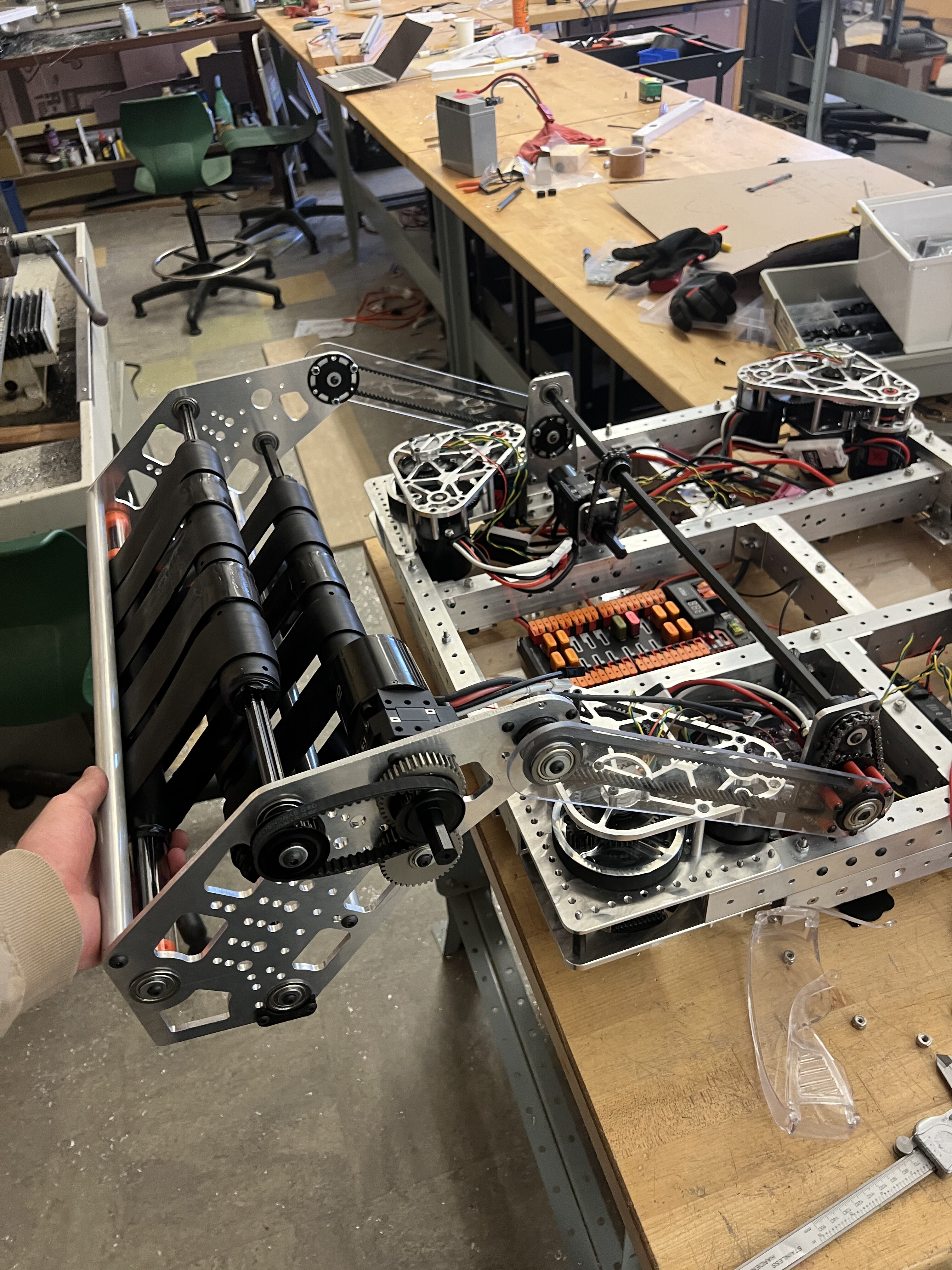
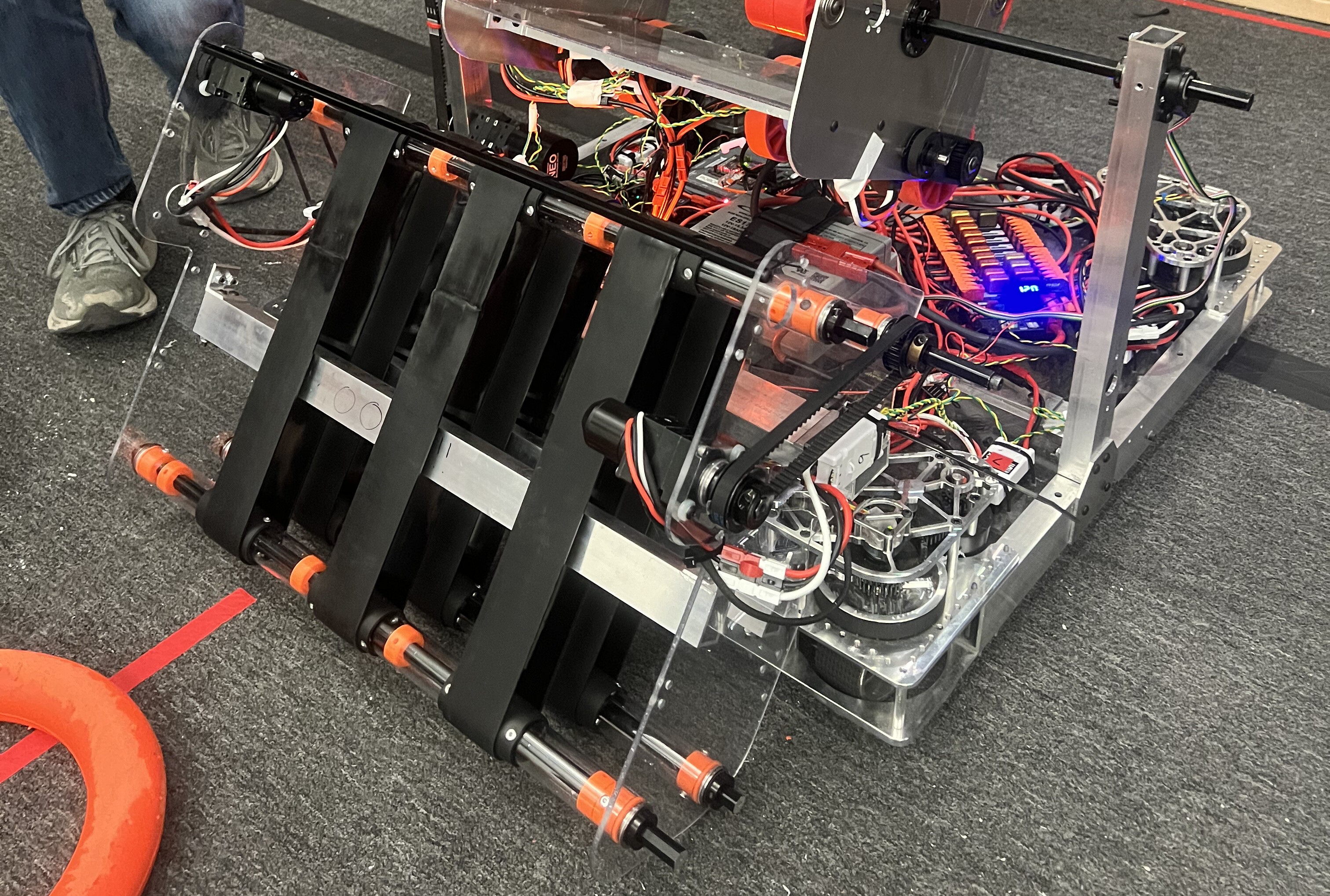
Advanced Four-Bar Intake Mechanism
Led the development through seven major design iterations (V1-V7), creating an innovative intake
system with ground pickup capability and automatic collision response.
Ground Pickup: Automatic wall detection and sensor-based game piece tracking
Virtual Four-Bar Geometry: Compact storage within frame perimeter, extending 12
inches for collection
Self-Protecting Design: Collision response system using 1/4" polycarbonate arms
with chain drive
Sensor Integration: Beam break sensors for automated detection and consistent
piece acquisition
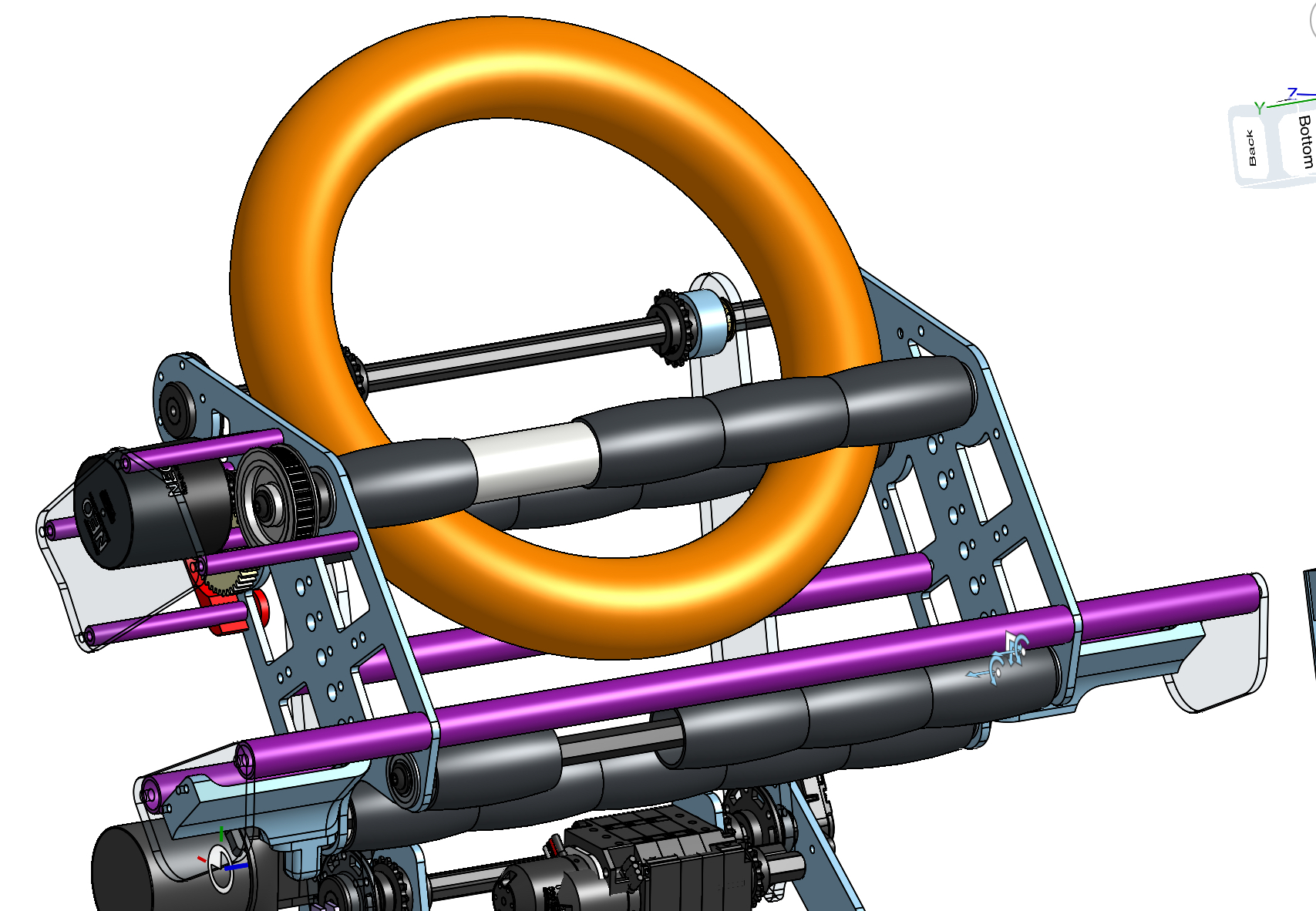
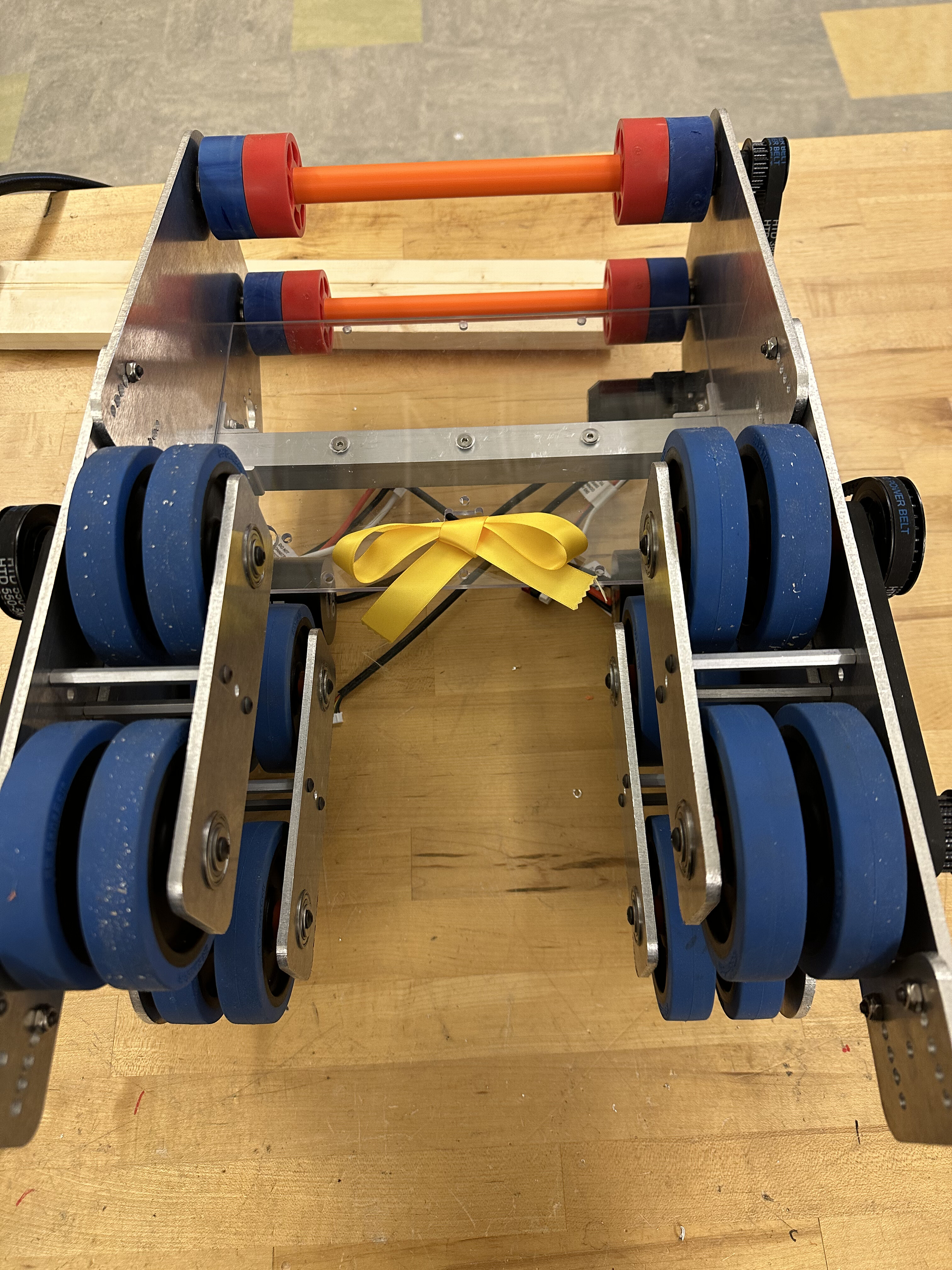
Optimized Performance: 10 polyurethane belts (5 per side) for reliable note
collection at any robot speed
Adjustable Shooter System
Designed through multiple prototyping iterations to achieve consistent long-range shooting with
automated targeting.
Dual Flywheel Design: Two rows of wheels with independent speed control for
ball spin
Optimized Compression: 1.5" compression distance found through extensive
testing
Centered Pivot Point: Low center of gravity for balanced operation
3D Printed Hood: Custom geometry for optimal ball trajectory
Vision Integration: Limelight-based targeting with distance calculation
Elevator & Climber System
Two-Stage Design: Inner rails sliding on outer rails using bearings
Shooter Mount: Through-bore encoder for precise rotation control
Improved Stability: Redesigned after first competition with C-channel support
and chain drive
Maximum Height: Capable of reaching amp and trap scoring positions
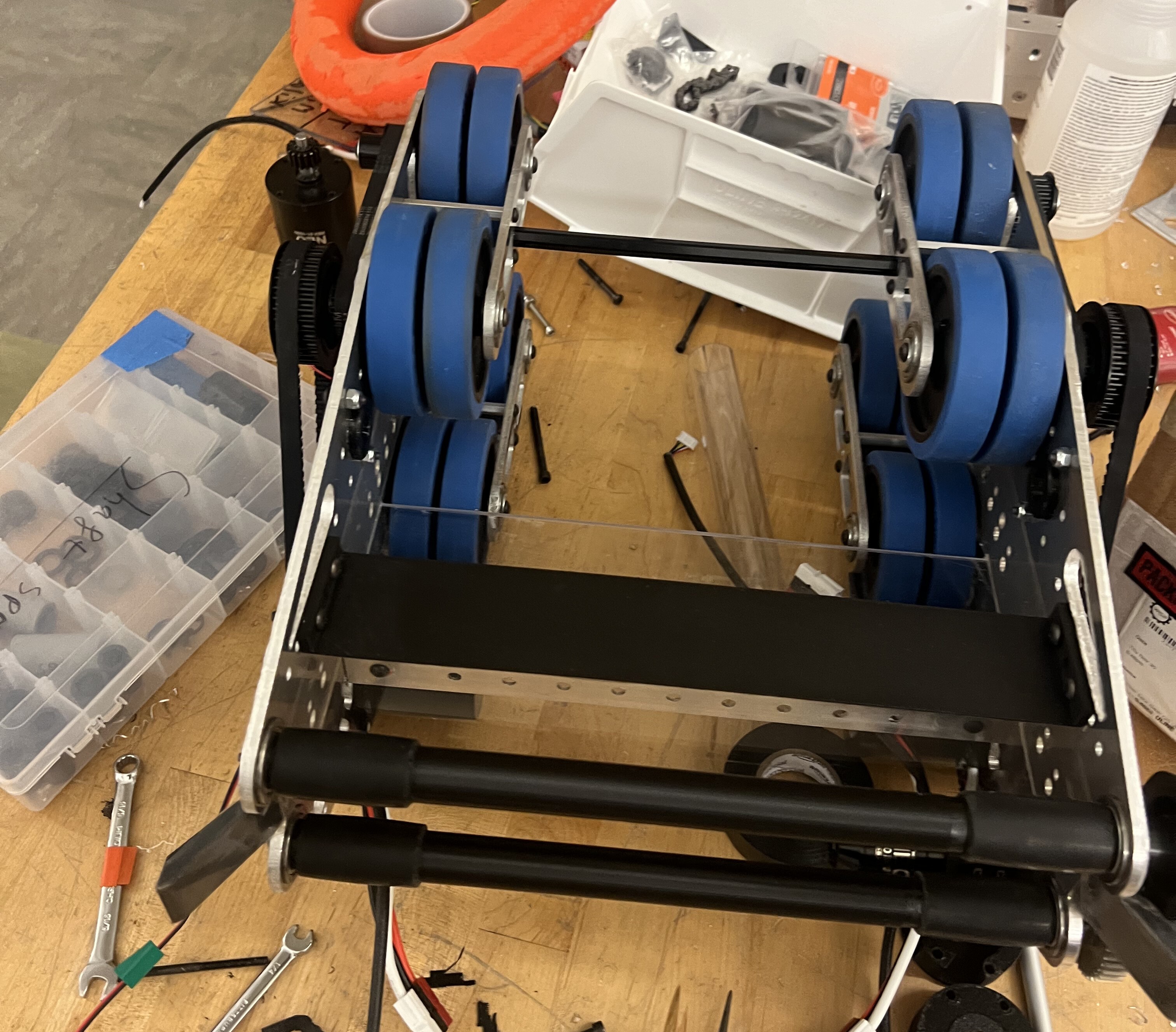
26" x 26" Swerve Drive Base
Compact Design: Minimal footprint while fitting all subsystems
Low Center of Gravity: Belly pan positioned as low as possible
Lightweight Construction: 1/16" box on inner rails with strategic weight
reduction
Easy Mounting: End caps for clean box connections without angle brackets
Development Process
V1
First Prototype - Basic flywheel testing
V2
Compression Testing - Optimizing wheel spacing
V3
Hood Geometry - Adjusting trajectory and testing wheel spacing
accuracy at target
V4
Motor Gearing - Refining power delivery
V5 FINAL
Competition Ready - Dual flywheel with automated targeting and
funnel like intake
V1
First Concept - Testing different grip thickness
V2
Wheel Configuration - Testing different grip wheels and active
vs passive
V3
Arm Geometry - Optimizing virtual four bar linkage
V4
Machining - Trying out a machined version based on collected
data
V5
Belt Optimization - Increasing from 6 to 10 belts and
shortening them for the virtual four bar linkage
During the 2023 FIRST Robotics Competition season (CHARGED UP), I served as Team Captain,
Lead Builder,
and Robot Operator for Team 1391. Our robot "BAMI" featured a highly sophisticated
dual-purpose game piece
handling system capable of manipulating both cones and cubes at multiple scoring heights.
The robot utilized
a swerve drive chassis for exceptional maneuverability, a two-rotation point arm with
inverse kinematics,
and an advanced V4 grabber system with Sorbothane grip pads. Through extensive prototyping
and iteration,
we developed a competition-ready robot that showcased innovative mechanical design and
autonomous capabilities.
Key Mechanical Systems
Swerve Drive Chassis
Engineered a highly maneuverable drivetrain providing omnidirectional movement for precise
field positioning.
27" x 27" Frame: Compact design optimized for charge station balancing
Steel Electronics Board: Custom-machined steel board for low center of
gravity
80-Degree Tip Resistance: Could tilt up to 80 degrees without falling
over
Countersunk Holes: Flat-head screws prevent catching on charge station
Strategic Cutouts: Component access without requiring board removal
Enhanced Maneuverability: Full 360° rotation and translation
capabilities
[Image Placeholder: 2023 Swerve Drive Chassis - from PDF page 24/25]
Two-Rotation Point Arm (Shoulder + Elbow)
Developed a double-jointed articulated arm system enabling precise game piece placement from
ground level to high scoring positions.
Dual Joint Design: Shoulder and elbow rotation points for maximum reach
and flexibility
Chain-Driven Actuation: Shoulder motors mounted low in frame to
optimize center of gravity
Through-Bore Encoders: Precise angle monitoring for both shoulder and
elbow joints
Inverse Kinematics: Software-based positioning using x,y coordinate
input
Lightweight Construction: 1x2 box tubing with strategic material
reduction
Upgraded Chain: #35 chain on shoulder joint (upgraded from #25) for
improved reliability
Multiple Scoring Heights: Capable of all three grid levels plus ground
pickup
[Image Placeholder: 2023 Double-Jointed Arm Prototype - from PDF page 19]
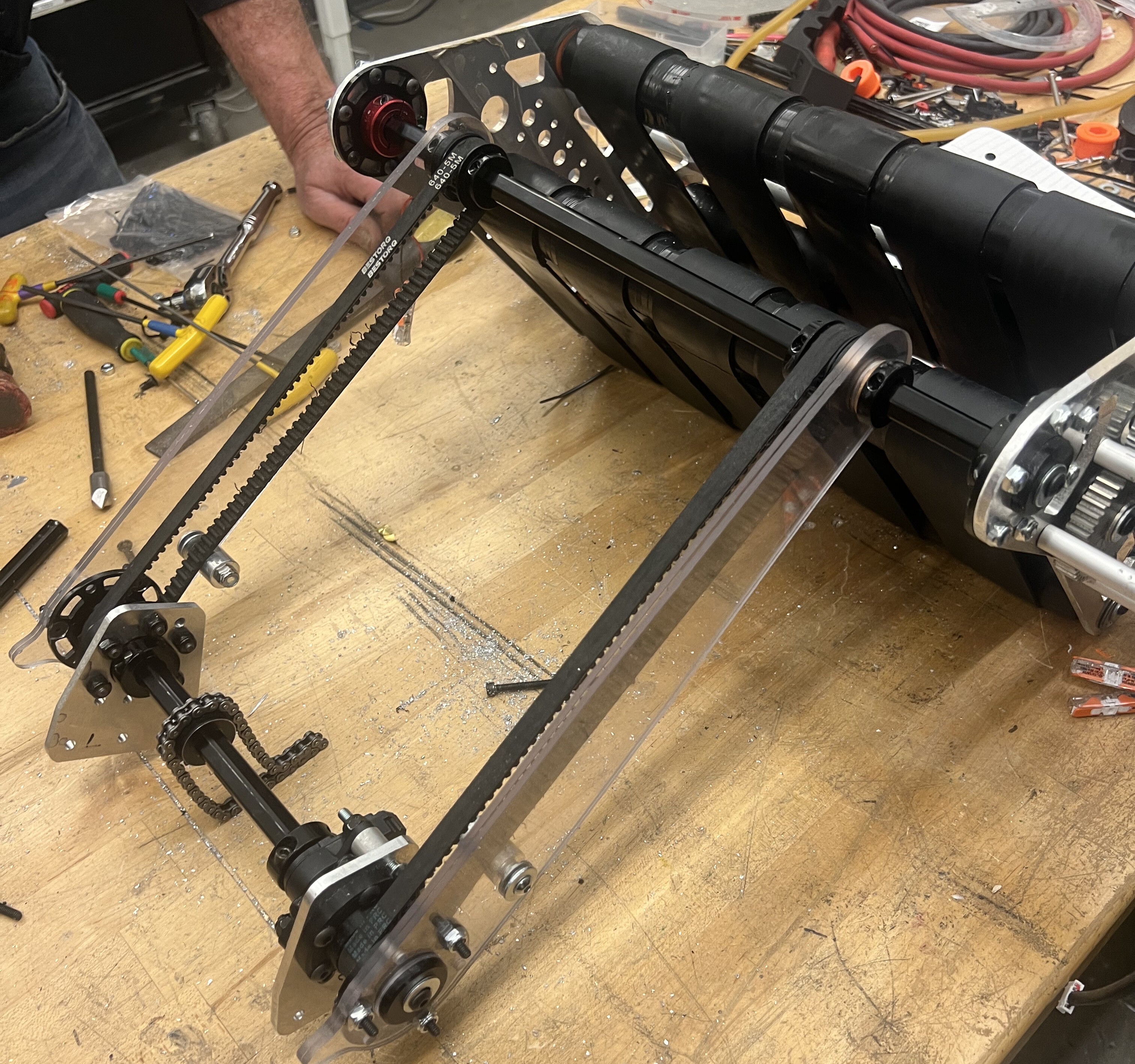
V4 Grabber System
Advanced through four major design iterations to create the final dual-purpose gripper for
both cones and cubes.
Sheet Metal Construction: V4 grabber machined from sheet metal for
durability and precision
Sorbothane Grip Pads: Superior grip material replacing initial
wheel-based design
Dual Pneumatic Pistons: Linear actuation providing variable grip
strength
3D-Printed Mounts: Custom geometry for optimal component integration
Pressure-Sensitive Design: Handles both game piece types with
appropriate force
Compact Paddle Design: Smaller paddles on V4 reduce cube over-gripping
and prevent sticking
Sensor Integration: Automated control for consistent piece acquisition
[Image Placeholder: 2023 V4 Grabber with Sorbothane Pads - from PDF page 30]
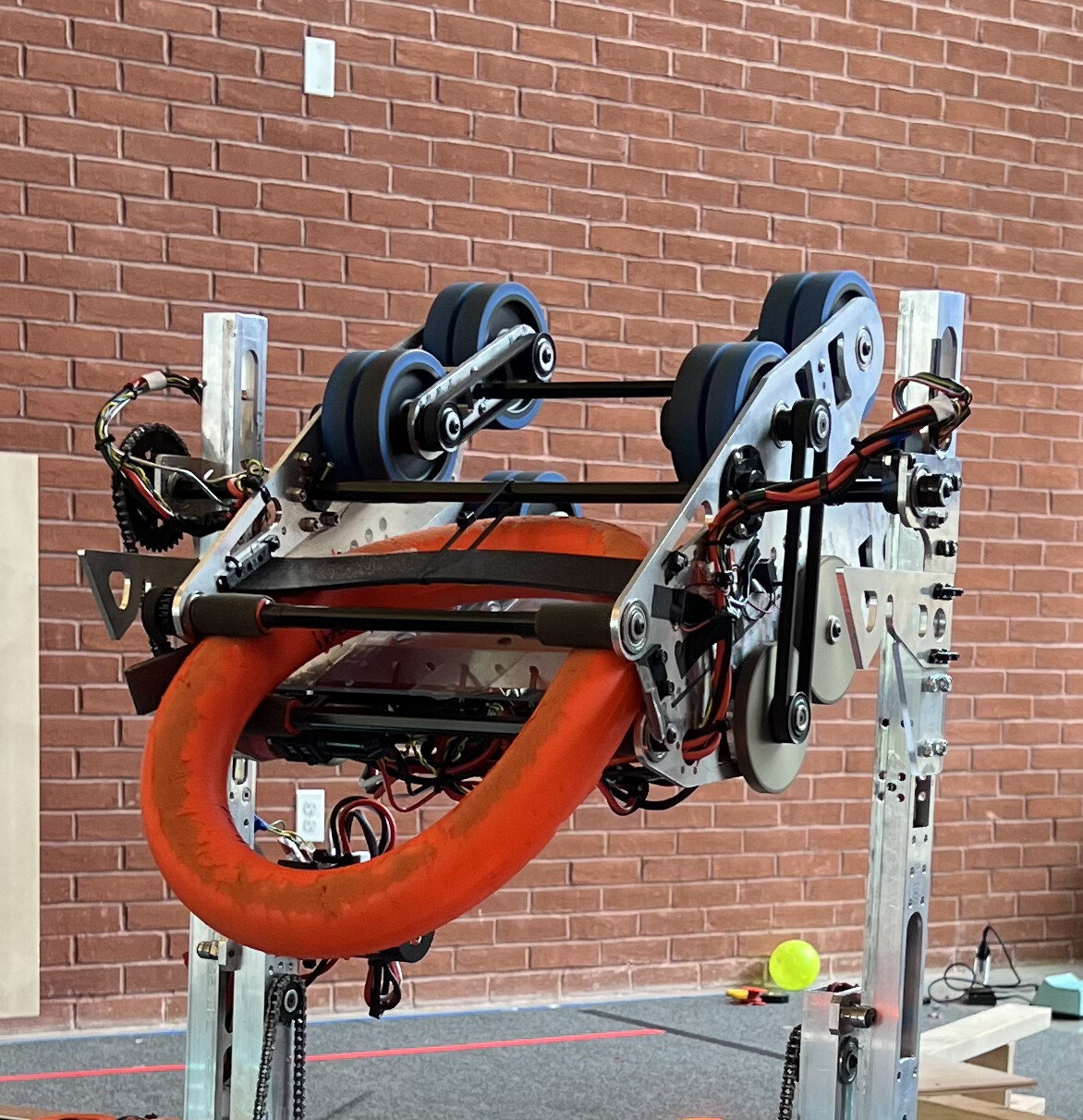
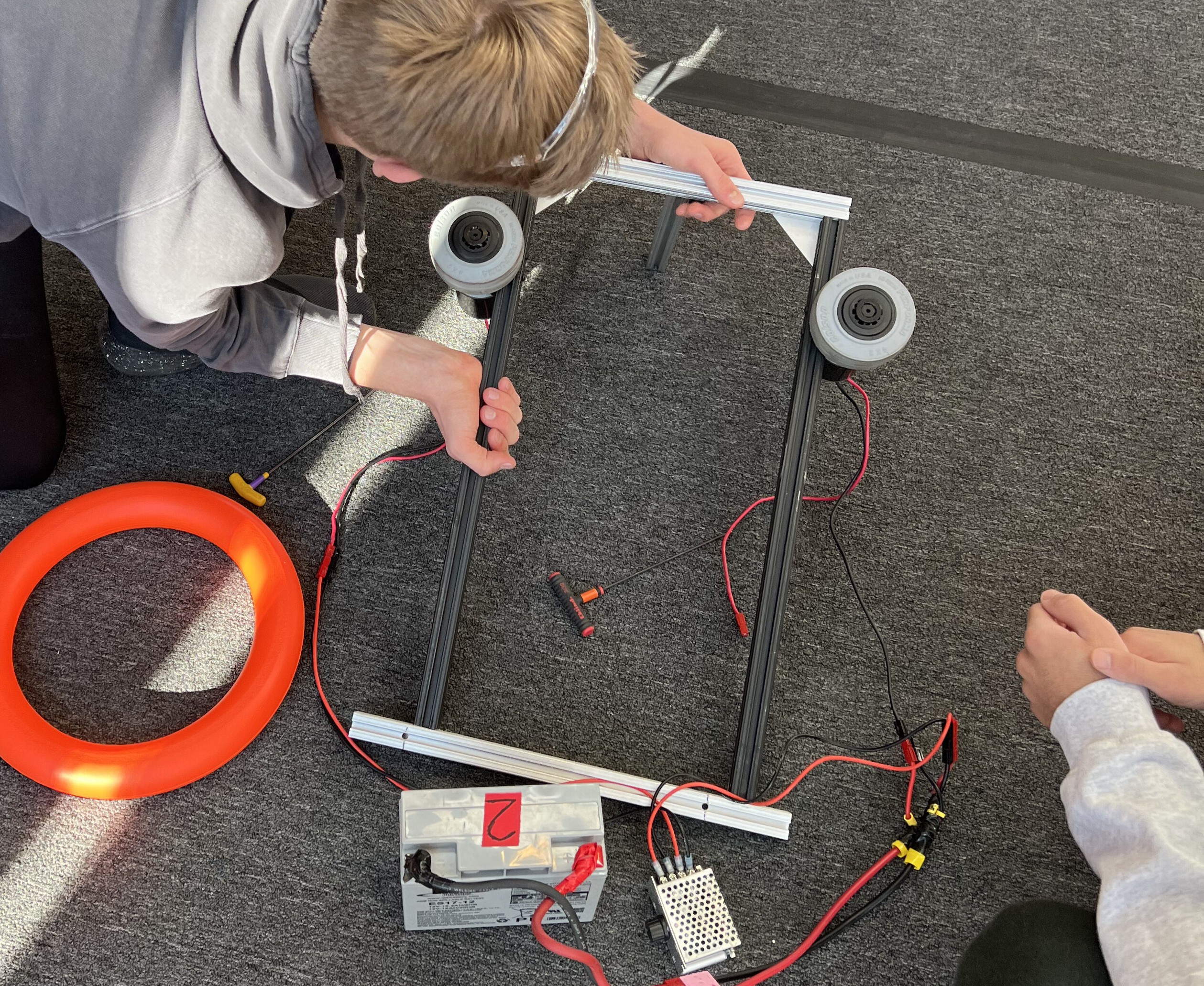
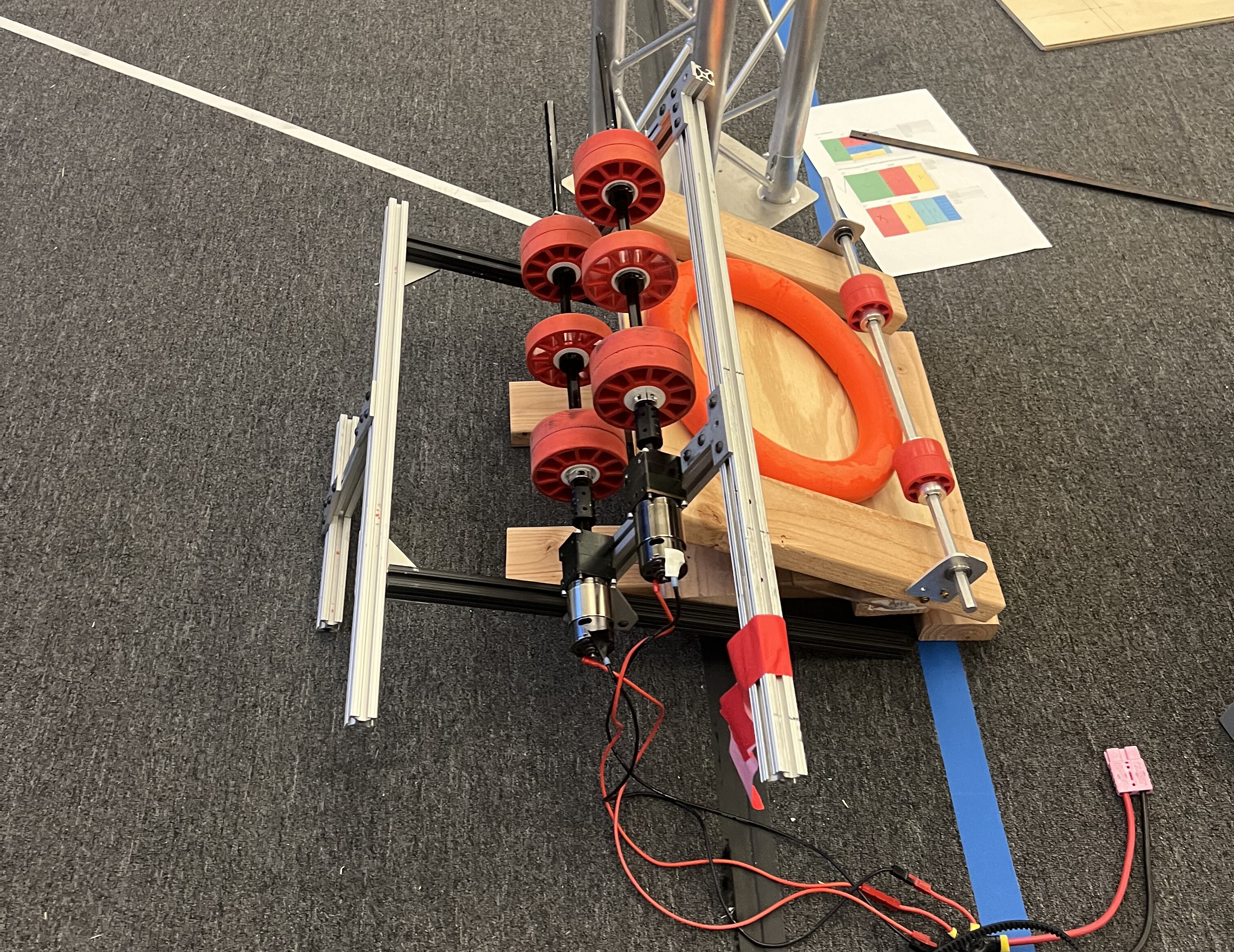
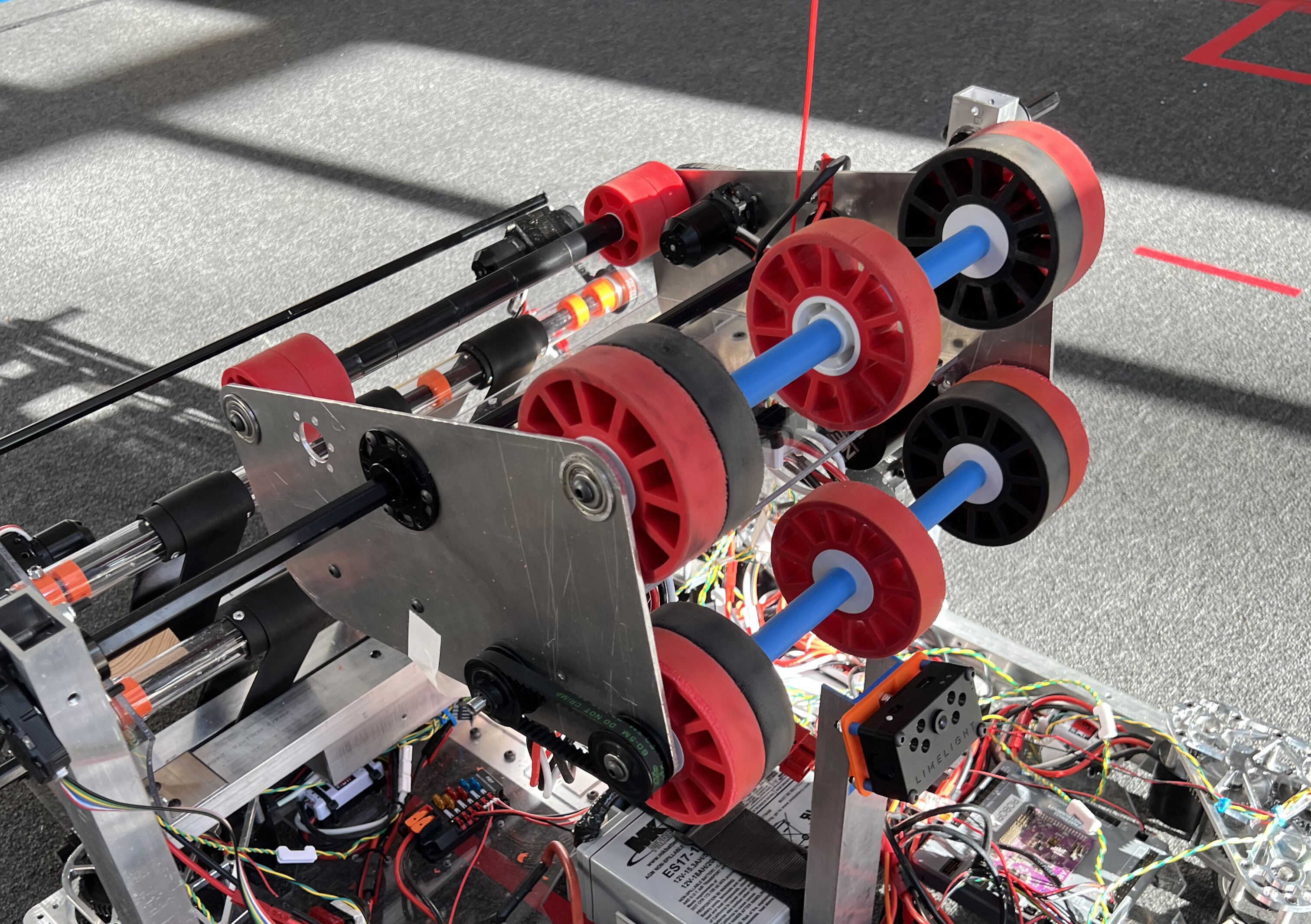
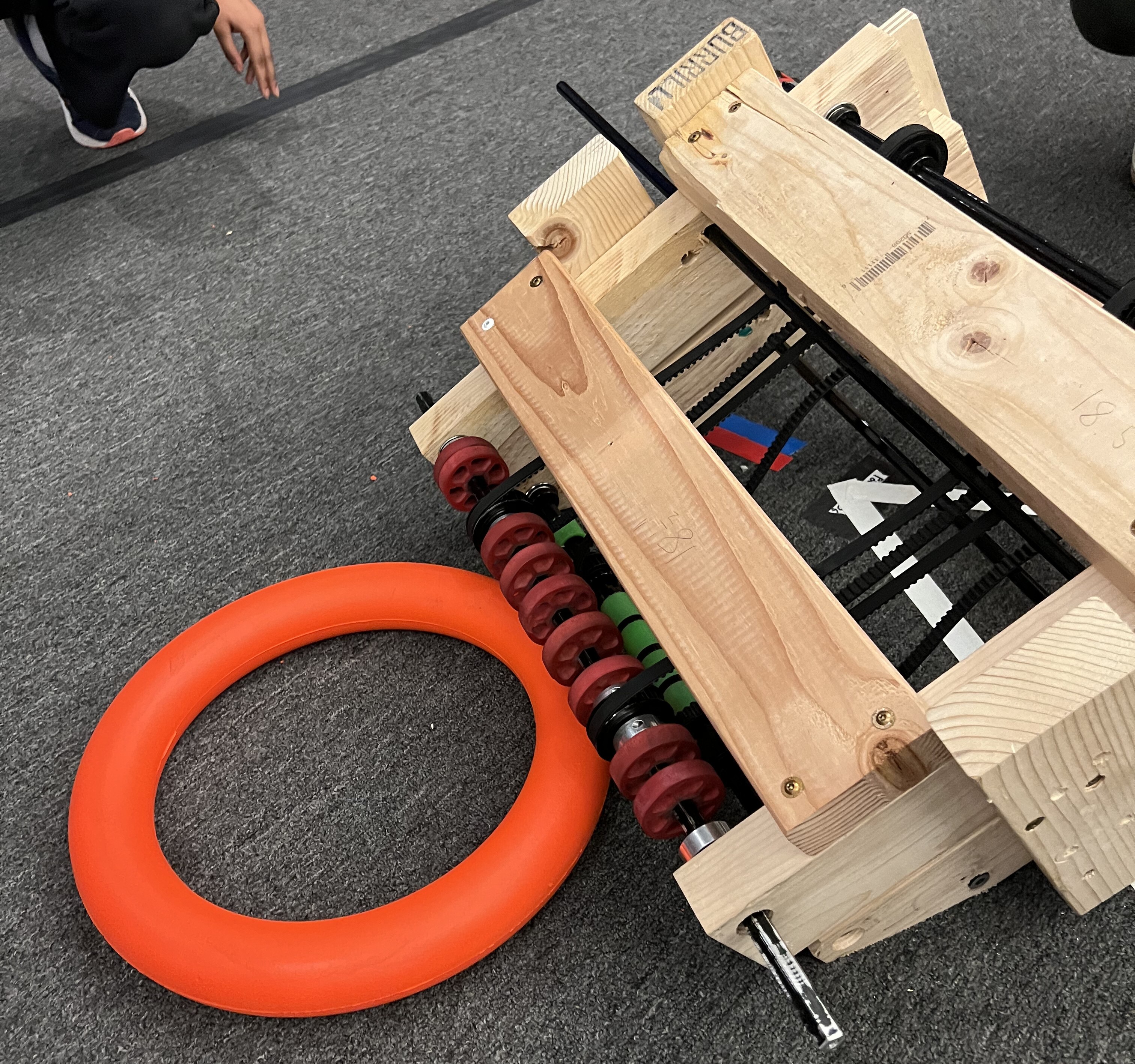
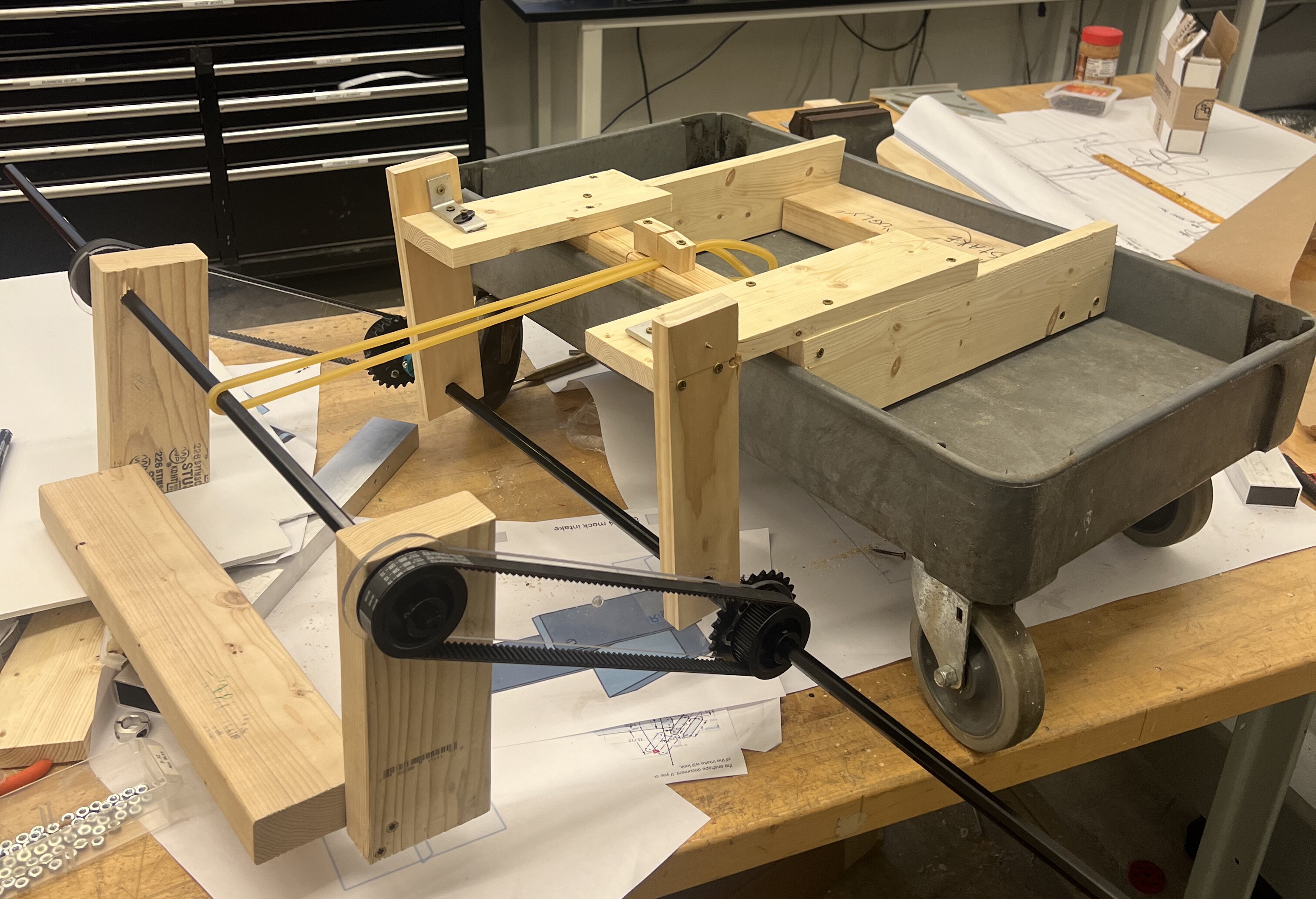
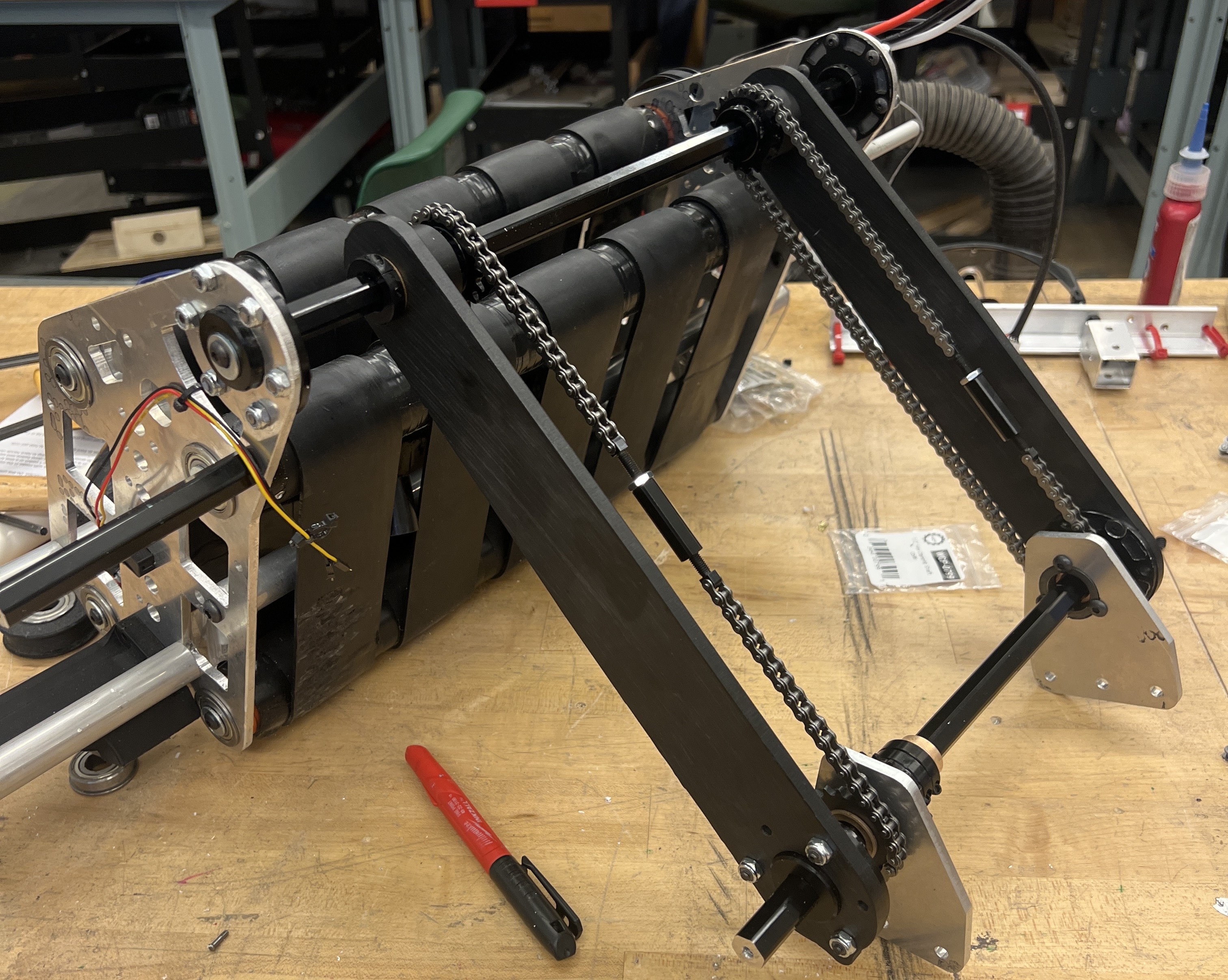
Over-the-Bumper Intake
Developed through seven major iterations to create a reliable floor collection system for
both cones and cubes.
12.5-Degree Opening: Wide capture range for forgiving piece acquisition
Dual Wheel Design: Two-layer wheels providing grip without launching
pieces
Virtual Four-Bar Mechanism: Compact storage within frame perimeter,
extends for collection
1/8" Polycarbonate Arms: Upgraded thickness for reduced flex during
operation
Constant Force Springs: Assisted deployment and retraction mechanism
Automated Detection: Sensor-based control for automatic piece handling
Natural Cone Orientation: Utilized gravity to orient bottom-heavy cones
correctly
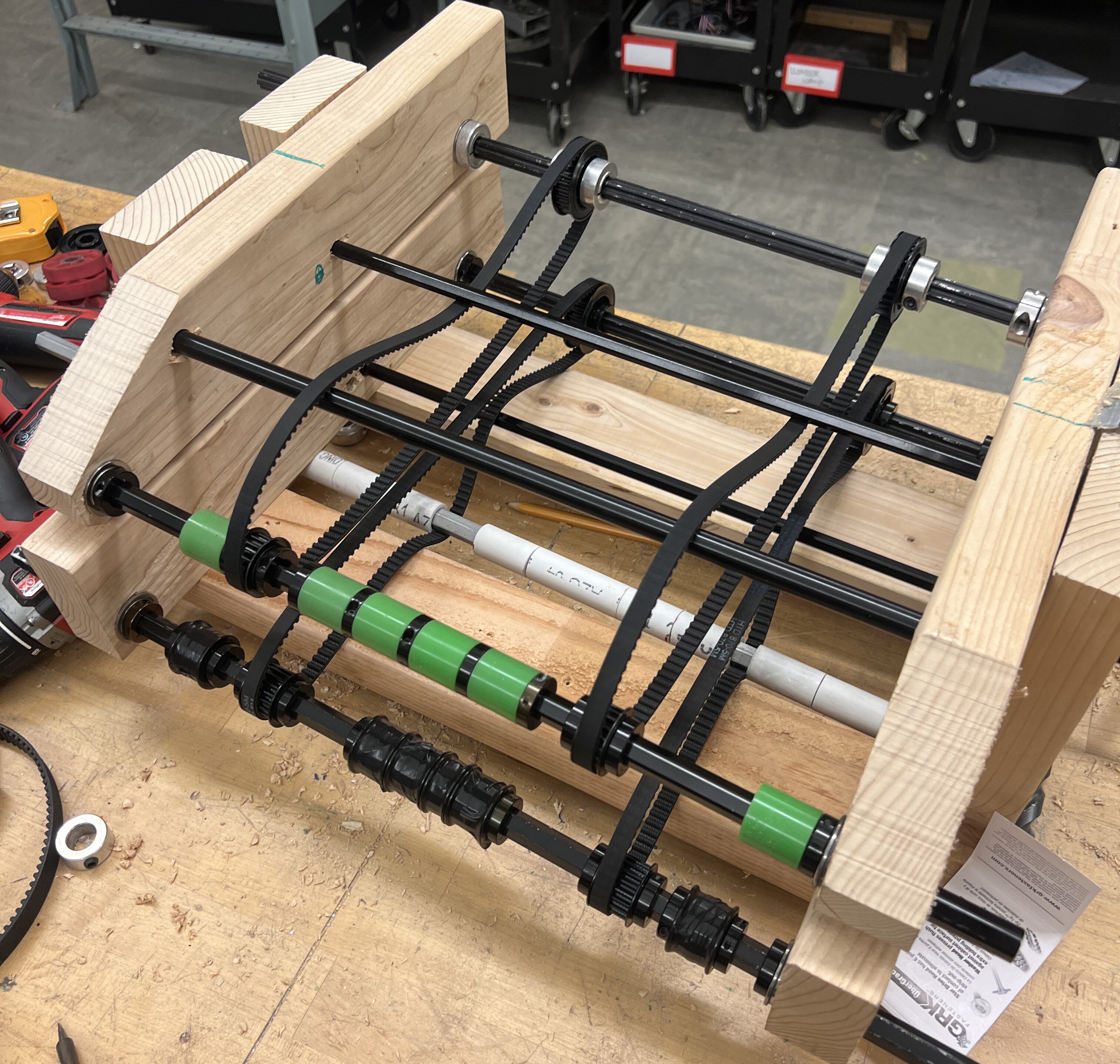
As a key member of FRC Team 1391 (The Metal Moose) during the 2022 Rapid React season, I
contributed to
developing our robot "Gustavo," which featured groundbreaking innovations in shooting and
climbing systems.
The robot showcased an unlimited-rotation turret with slip ring technology for continuous
vision tracking,
a sophisticated three-stage climbing elevator capable of traversing to the high bar, and an
intelligent
thirty-wheel indexer with color sensor integration. These advanced systems enabled
consistent autonomous
performance and helped propel our team all the way to the World Championship in Houston,
Texas.
[Image Placeholder: 2022 Robot "Gustavo" Full View - from PDF page 3]
Key Mechanical Systems
Unlimited Rotation Turret with Vision Tracking
Innovative shooting platform with continuous 360° rotation capability and automated
vision-based targeting.
Slip Ring Design: Limelight camera powered through slip ring enabling
unlimited continuous rotation
Vision-Based Auto-Targeting: Retroreflective tape detection with
real-time angle calculations
NEO Motor Control: Built-in encoder for precise angle positioning and
tracking
One-to-One Gear Ratio: Limelight rotates synchronously with turret for
accurate targeting
Four-Flywheel System: Consistent ball propulsion with variable speed
control based on distance
3D-Printed \u0026 CNC Hood: Custom geometry for optimal ball trajectory
(combination of CNC cutting and 3D printing)
Automated Distance Calculation: RoboRIO integration for dynamic power
adjustment based on range
[Image Placeholder: 2022 Unlimited Rotation Turret with Slip Ring - from PDF page 2]
Three-Stage Climbing System
Sophisticated belt-and-piston elevator mechanism engineered for traversal bar ascent with
anti-swing features.
Belt and Piston Design: Advanced system enabling rapid bar-to-bar
traversal to high and traversal bars
Anti-Swing Mechanism: Piston pulls robot closer to lower center of mass
during climb
Dual Hook System: Fixed and moving hooks with precision-engineered tilt
angles
Spring-Loaded Fixed Hooks: Allow bar to slide through during
transitions between stages
Aluminum Channel Construction: Integrated belts and bearings for
smooth, reliable operation
Multi-Process Manufacturing: Components fabricated using CNC router,
mill, 3D printing, and lathe
Four-Hook Configuration: Redundant hooks for secure attachment at each
climbing stage
[Image Placeholder: 2022 Three-Stage Climber Action Shot - from PDF page 2]
[Image Placeholder: 2022 Front Limelight Ball Recognition]
Tank Drive with Mixed Wheel Configuration
West Coast Drive Base: Proven drivetrain design for reliable field
performance
Mixed Wheel Configuration: Four Versa wheels with two front Omni wheels
for enhanced turning
Enhanced Rotation: Omni wheels ease turning radius while maintaining
straight-line speed
Single-Speed Gearbox: Simple but effective drive system optimized for
game requirements
Vision Integration: Works seamlessly with dual Limelight setup for
collection and shooting
CNC Manufactured Components: Precision parts from CNC mill and router
for durability
[Image Placeholder: 2022 Technical Diagram Showing All Subsystems - from PDF page 1]
Competition Results
World Championship Qualification - Houston, Texas
Competition 1: Rank 10 (11-6-0 record) - Creativity Award sponsored
by Rockwell Automation
Competition 2: Rank 5 (10-7-0 record) - Autonomous Award sponsored
by Ford
Competition 3: Rank 12 (8-6-0 record)
Consistent Playoff Performance: Multiple semifinals and
quarterfinals appearances
Key Innovations \u0026 Contributions
Slip Ring Integration: First time our team implemented continuous
rotation vision tracking system
Multi-Stage Climbing: Sophisticated traversal mechanism with anti-swing
control technology
Advanced Sensor Integration: Dual Limelight setup with color sensors
for comprehensive automation
Automated Game Piece Handling: Driver-assist features throughout
collection, indexing, and shooting
Robust Manufacturing Processes: Utilized CNC routing, milling, 3D
printing, and lathe work
Five-Ball Autonomous: Demonstrated advanced autonomous programming and
mechanical reliability
Three-Year Impact & Growth
My three-year journey with FIRST Robotics Competition represents a progression from
contributor
to
leader, from learning fundamentals to teaching others, and from implementing designs to
creating
comprehensive documentation that sets new team standards. Each season built upon the last,
culminating in World Championship appearances, top 3% global rankings, and multiple
Engineering
Excellence awards.
Technical Skills Developed
CAD & Simulation: Fusion 360, SolidWorks - from basic modeling to
inverse
kinematics
Manufacturing: CNC mill, CNC router, lathe, 3D printing, sheet metal
fabrication
Mechanical Design: Iterative prototyping, weight optimization, center
of
gravity management
Control Systems: Motor controllers, encoders, sensors, pneumatics
integration
Team Management: Led 30+ member team across mechanical, electrical,
programming, and business sub-teams
Project Planning: Managed build schedules, prototyping timelines, and
competition deadlines
Mentorship: Trained new members in CAD, machining, and design processes
Competition Strategy: Coordinated with alliance partners and adapted to
field
conditions
Documentation Standards: Established comprehensive engineering notebook
practices
Key Learnings
My three seasons with FIRST Robotics Competition transformed how I approach engineering
challenges.
The six-week build season forced rapid iteration and decision-making under pressure—there's no
time
to perfect every detail in CAD when you need a working prototype to test. This taught me to
build
physical mockups early, fail fast, and iterate based on real-world performance rather than
theoretical perfection.
Leading a team of 30+ students across mechanical, electrical, programming, and business
sub-teams
showed me that technical excellence alone doesn't win competitions. Communication between
subsystems,
clear documentation, and shared understanding of design constraints matter just as much as
innovative
mechanisms. When our intake team couldn't coordinate with programmers, even the best hardware
failed.
Competing at World Championships and earning multiple Engineering Excellence awards validated
that
thorough documentation and design process matter to judges and clients alike. The comprehensive
engineering notebooks I created became team standards because they forced us to articulate not
just
*what* we built, but *why* each design decision was made and *how* we validated it.
Most importantly, FRC taught me that setbacks on the competition field are inevitable—mechanisms
break, sensors fail, and alliance partners have off-matches. The teams that succeed are those
that
can quickly diagnose problems in the pits, make field repairs under time pressure, and adapt
their
strategy based on what's actually working. This resilience and adaptability has proven
invaluable in
every engineering project since.