Munchkin V3
V3 is our current development version, rebuilding the system with higher-torque servos, an integrated plate holder, and a modular tool-changer. User testing will hopefully be happening at Briarwood Rehabilitation & Healthcare Center in Fall 2026.
Automatic Tool Changer
V3 introduces a fully automatic fork-and-spoon switcher. The mechanism locks and releases each utensil in under 2 seconds — no hands required, and the correct tool is always selected based on what's being served.

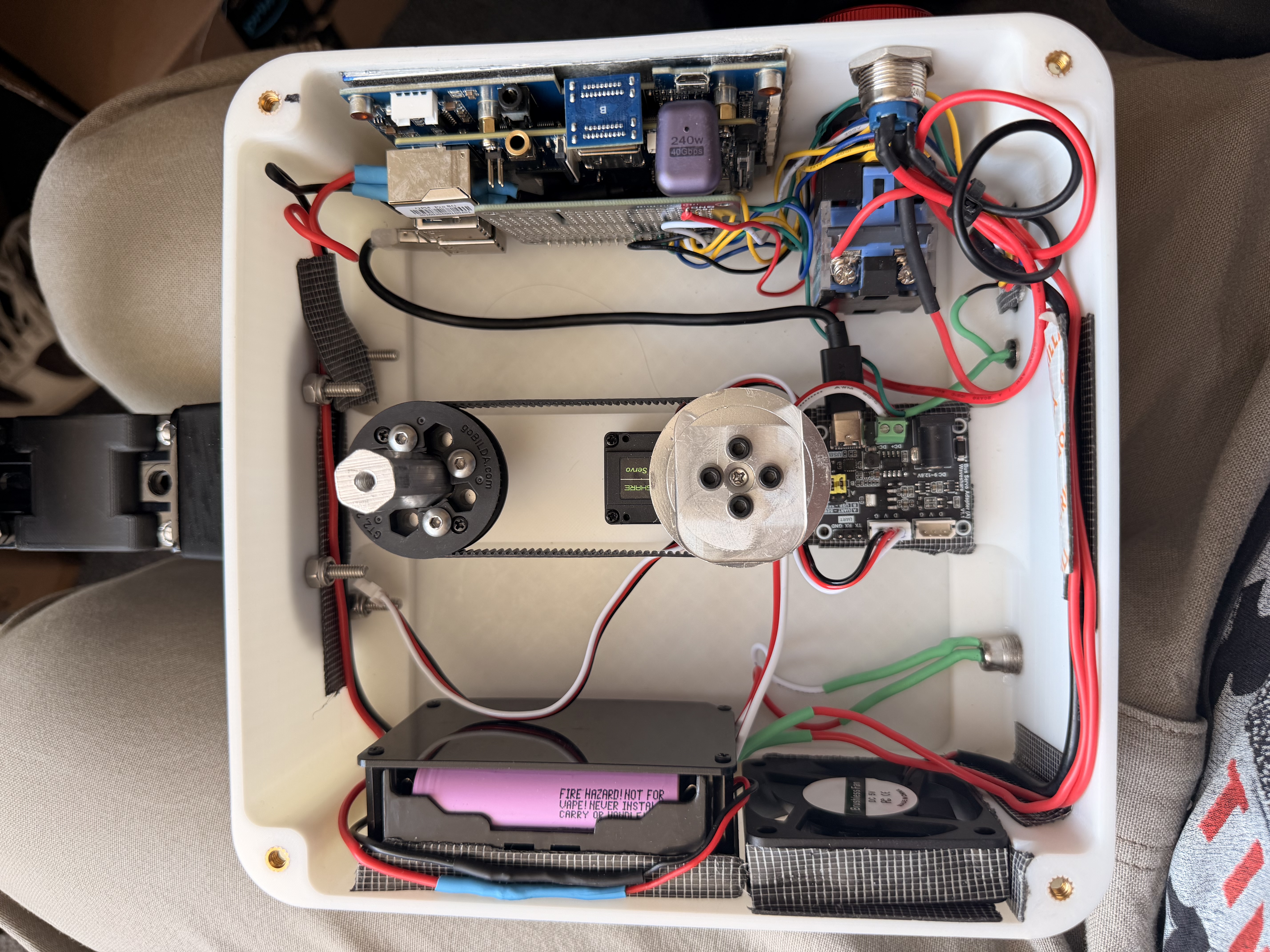
High-Precision Servos
Upgraded to 30 kg·cm servos with 0.1° angular precision. Smoother motion, more torque, and far better positional accuracy than v1.
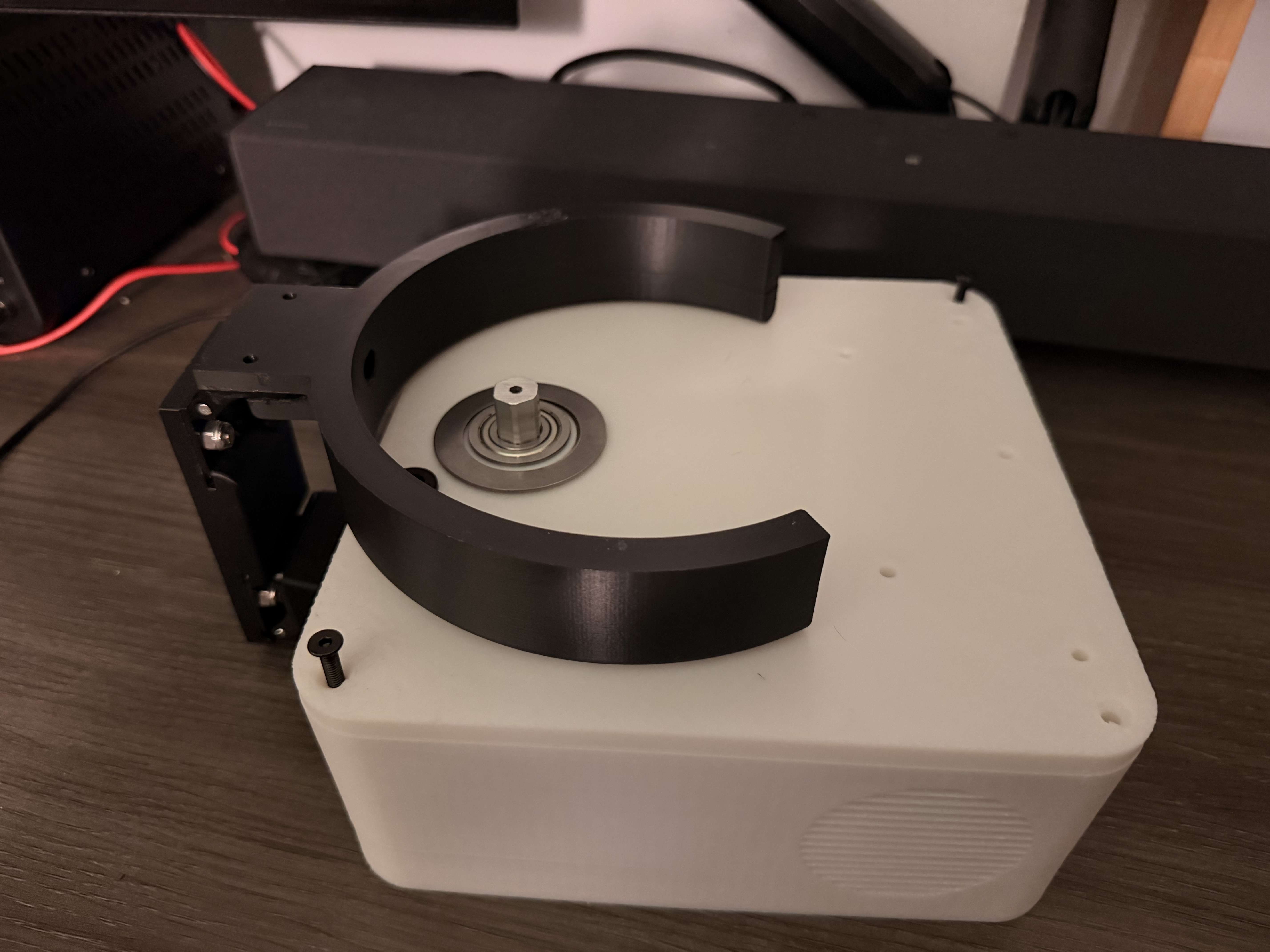
Integrated Plate Holder
The plate holder is now built into the device body and folds flush when not in use — no separate tray to carry, and no setup required.
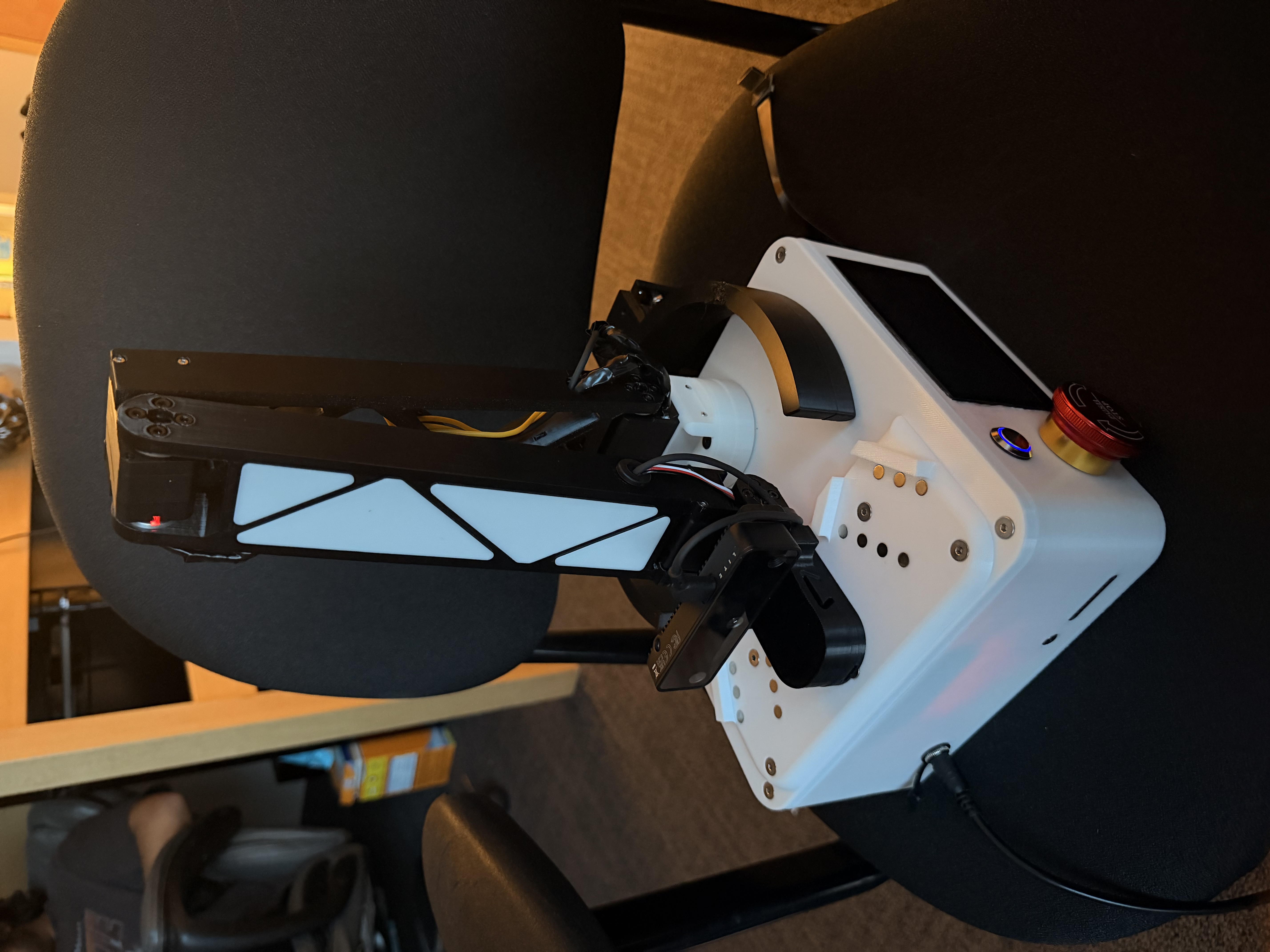
Folding Robotic Arm
The arm now folds completely within the device body, bringing the whole system to a compact footprint for easy transport and storage.

Onboard Touchscreen
An integrated touchscreen lets users select feeding mode, speed, and other settings directly on the device — no phone or laptop needed.
Adaptive Control Ports
New external ports support switches, sip-and-puff controllers, and other assistive devices — enabling partial or full control depending on each user's capabilities.
AI Food Tracking
Computer vision will identify what's on the plate, track portion sizes, and provide nutritional estimates in real-time — making Munchkin a smarter feeding companion.