Overview
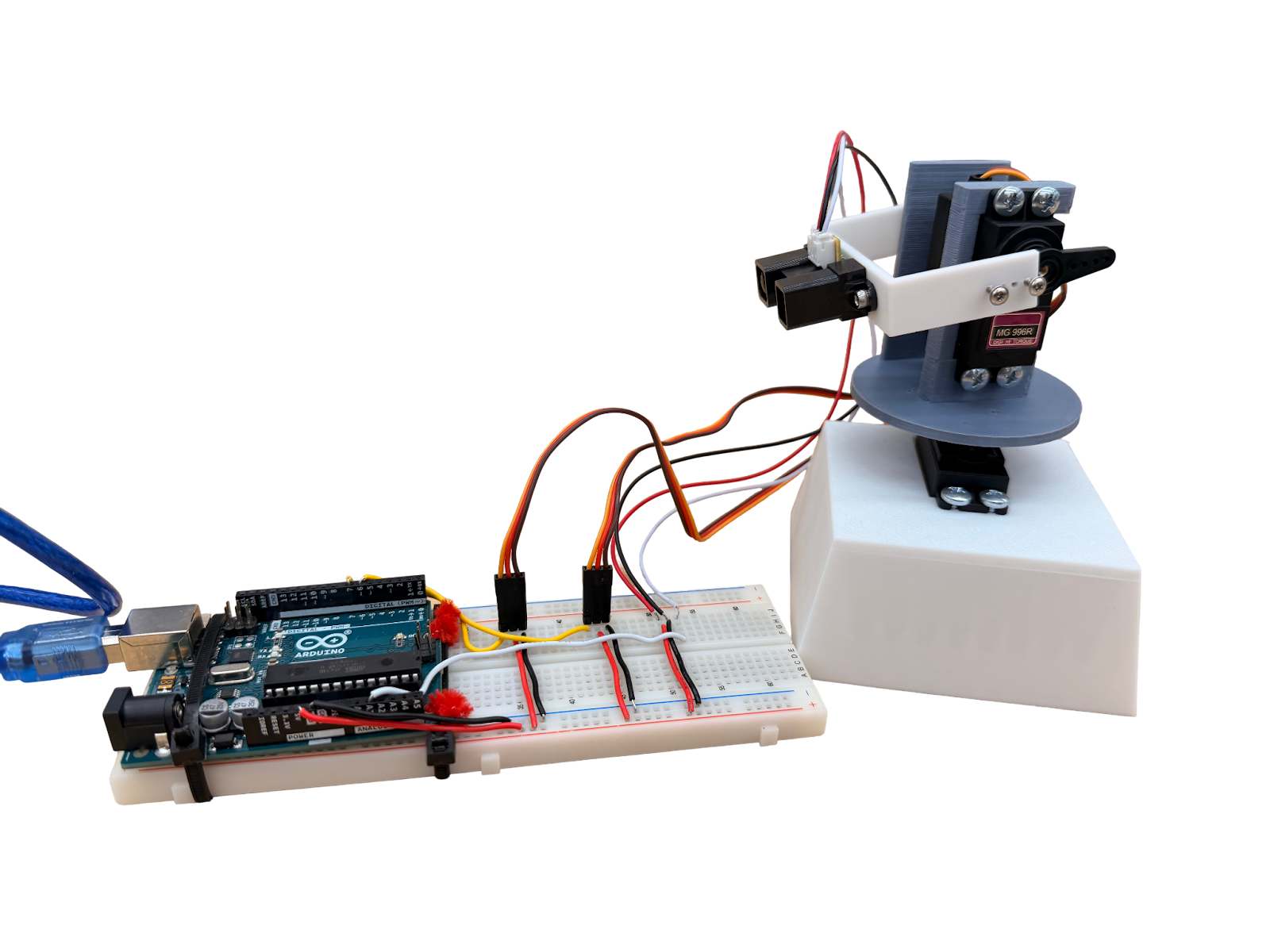
For the PIE Mini Project 2, we designed a 3D scanner using an Arduino, two servo motors, and a Sharp GP2Y0A02YK0F infrared distance sensor. Our mechanical design consists of a pan-and-tilt mechanism that allows the sensor to capture distance measurements from multiple angles, which are then processed using Python to generate 3D point cloud visualizations of scanned objects.
Hardware Components
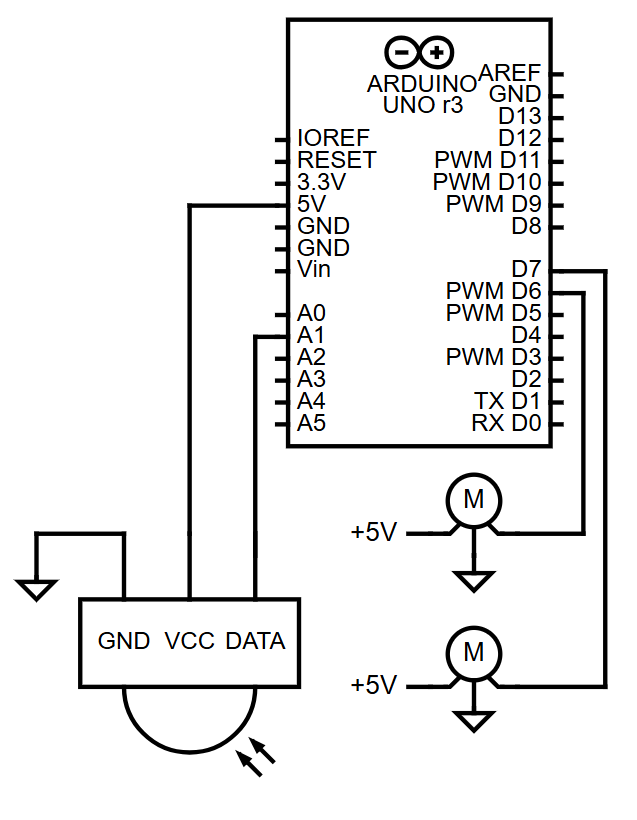
- Arduino microcontroller for motor control and sensor data acquisition
- Two servo motors for pan-and-tilt motion
- Sharp GP2Y0A02YK0F infrared distance sensor (20-150cm range)
- Custom 3D printed mounting system for sensor and motors
- Rotating platform for object placement
Wiring Diagram
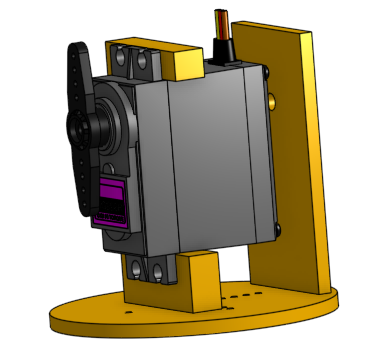
Mechanical Design
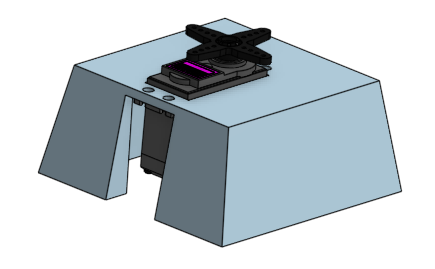
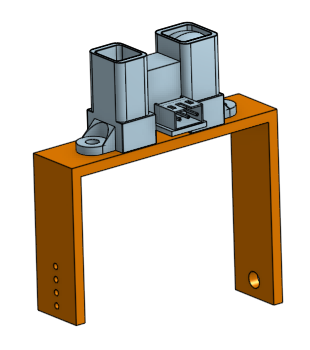
CAD Model
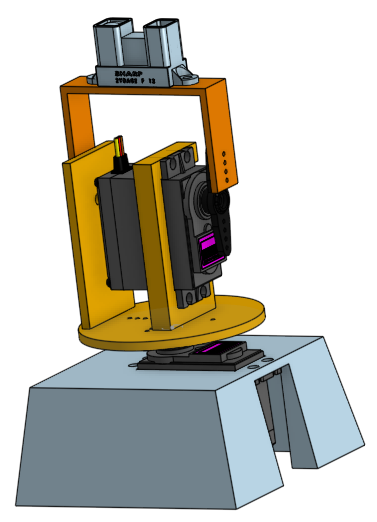
The mechanical design includes:
- Base structure providing stability for scanning operations
- Rotating platform driven by servo motor for horizontal scanning
- Sensor mount with adjustable tilt mechanism for vertical coverage
- Optimized geometry to minimize mechanical interference during scanning
Software & Processing
Arduino Code
The Arduino controls the servo motors and reads distance measurements from the IR sensor, sending data over serial communication to Python for processing.
// Arduino scanning control
#include <Servo.h>
Servo panServo, tiltServo;
void loop() {
for (int pan = 0; pan <= 180; pan += 5) {
panServo.write(pan);
for (int tilt = 0; tilt <= 90; tilt += 5) {
tiltServo.write(tilt);
delay(100);
int distance = analogRead(A0);
Serial.print(pan); Serial.print(",");
Serial.print(tilt); Serial.print(",");
Serial.println(distance);
}
}
}Python Data Processing
Python receives the scan data, converts sensor readings to distances, and transforms spherical coordinates to Cartesian coordinates for 3D visualization.
# Python data processing and visualization
import numpy as np
import matplotlib.pyplot as plt
def spherical_to_cartesian(r, theta, phi):
x = r * np.sin(np.radians(phi)) * np.cos(np.radians(theta))
y = r * np.sin(np.radians(phi)) * np.sin(np.radians(theta))
z = r * np.cos(np.radians(phi))
return x, y, z
# Process scan data
points = []
for pan, tilt, sensor in scan_data:
distance = 29.988 * pow((sensor * 5.0/1023.0), -1.173)
x, y, z = spherical_to_cartesian(distance, pan, tilt)
points.append([x, y, z])
# 3D visualization
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(points[:,0], points[:,1], points[:,2])
plt.show()Technical Mathematics
IR Sensor Calibration
The Sharp GP2Y0A02YK0F infrared distance sensor provides an analog voltage output that correlates to the distance of an object. The relationship between voltage and distance is non-linear and follows an inverse power law.
Sensor Calibration Equation:
distance (cm) = 29.988 × V-1.173
Where V is the sensor voltage (0-5V). The Arduino's 10-bit ADC converts this to a digital value (0-1023), requiring:
V = (ADC_value × 5.0) / 1023
This calibration was determined empirically by measuring known distances and fitting a power-law curve to the voltage readings. The sensor's effective range is 20-150 cm, with optimal accuracy between 30-100 cm.
Coordinate System Transformation
The scanner operates in a spherical coordinate system (r, θ, φ) but 3D visualization requires Cartesian coordinates (x, y, z). The transformation involves:
- r: radial distance from sensor (measured by IR sensor)
- θ: azimuthal angle, horizontal pan (0-180°)
- φ: polar angle, vertical tilt (0-90°)
Spherical to Cartesian Transformation:
y = r × sin(φ) × sin(θ)
z = r × cos(φ)
These equations derive from the geometric relationship between spherical and Cartesian systems. The polar angle φ measures from the z-axis (vertical), while the azimuthal angle θ measures rotation around the z-axis from the x-axis.
Data Filtering and Noise Reduction
IR distance sensors are susceptible to noise from ambient light, surface reflectivity variations, and electrical interference. Several filtering techniques were implemented:
- Moving Average Filter: Each distance reading is averaged with neighboring readings to smooth short-term fluctuations. A 3-point moving average reduces noise while maintaining edge detail.
- Outlier Rejection: Readings outside the sensor's valid range (20-150 cm) are discarded to prevent corrupted data points in the point cloud.
- Median Filtering: For each position, multiple samples are taken and the median value is used, rejecting extreme outliers while preserving true distance measurements.
- Surface Normal Filtering: Points with inconsistent local geometry (indicating noise or reflections) are identified and removed based on angle analysis with neighboring points.
Angular Resolution and Sampling
The scanning resolution is determined by the angular step size of the servo motors. A 5° increment was chosen to balance scan density with acquisition time:
- Horizontal sweep: 0-180° in 5° steps = 37 positions
- Vertical sweep: 0-90° in 5° steps = 19 positions
- Total data points per scan: 37 × 19 = 703 points
- Scan time: ~70 seconds (100ms delay per position)
Finer angular resolution (e.g., 2°) increases point cloud density but extends scan time proportionally. The 5° step provides adequate detail for objects 20-50 cm in size while maintaining reasonable scan duration.
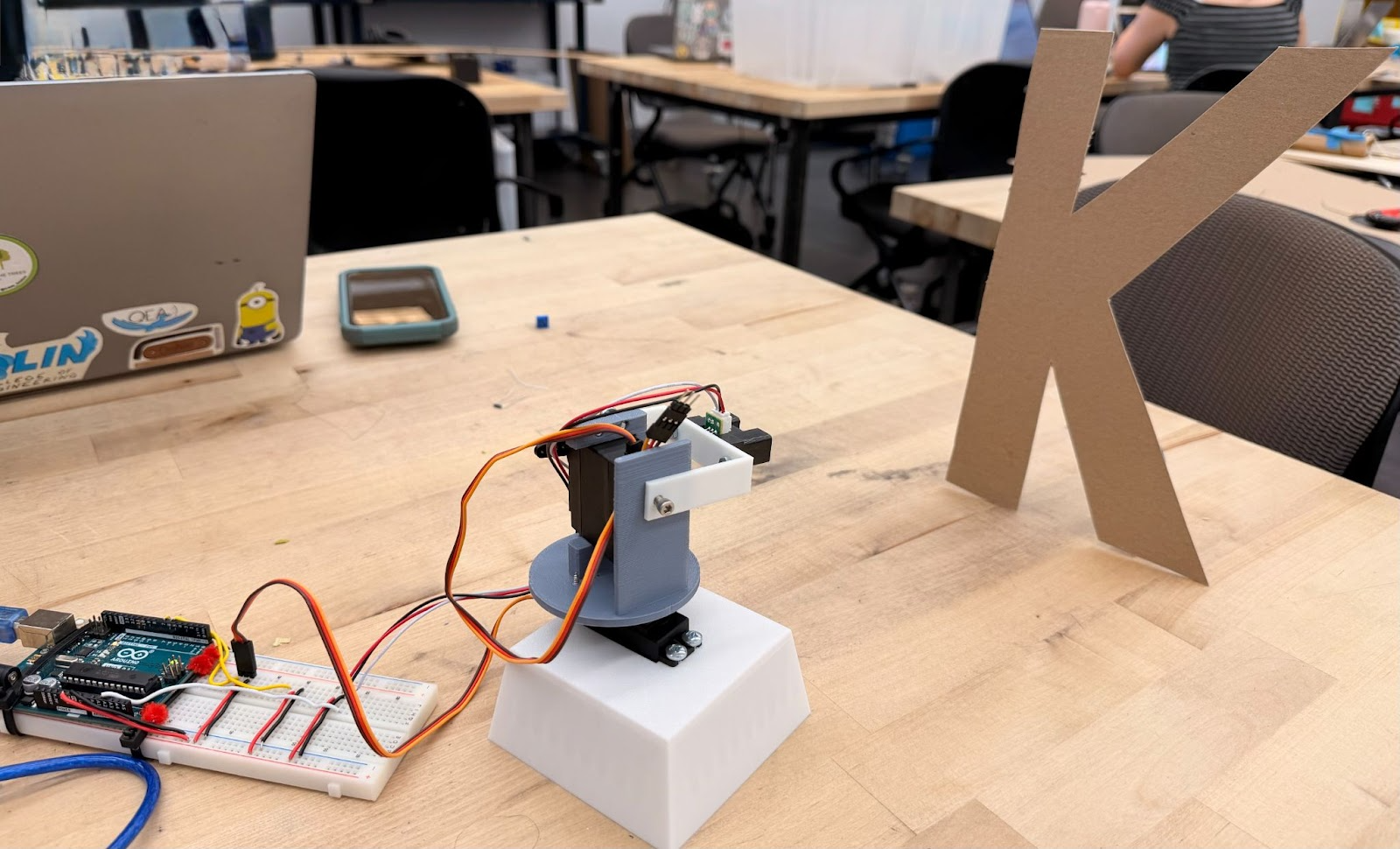
Scanning Process
Scan Setup
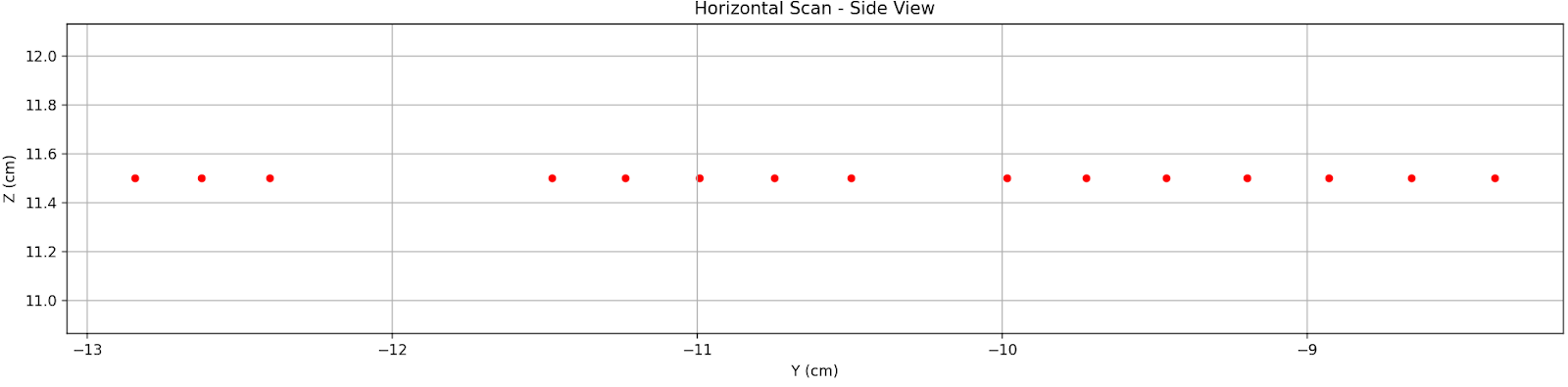
Horizontal Scan Data
Full 3D Scan Results
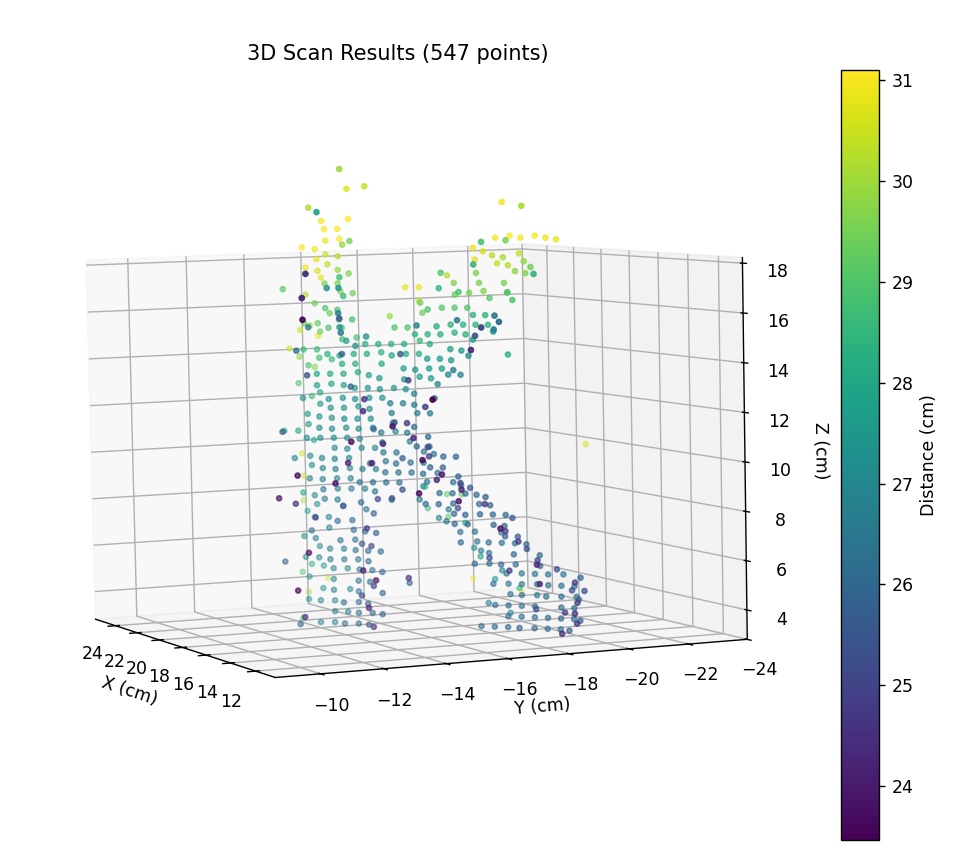
Key achievements:
- Successfully captured 3D point cloud data of various objects
- Accurate distance measurements within sensor's 20-150cm range
- Smooth pan-and-tilt motion for comprehensive angular coverage
- Real-time data transmission and visualization
- Integration of mechanical, electrical, and software systems
Skills Developed
- Arduino programming and serial communication
- Python data processing and 3D visualization (matplotlib)
- CAD modeling for custom mechanical components
- Servo motor control and timing optimization
- IR sensor calibration and distance conversion
- Coordinate system transformations (spherical to Cartesian)
- System integration across hardware and software domains